 |
|
|
|
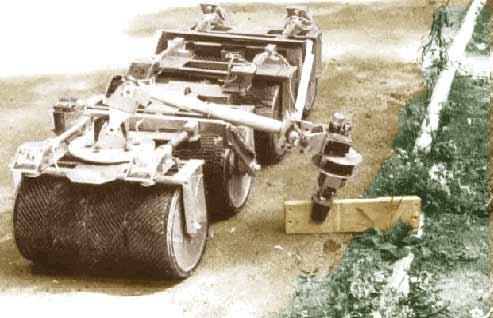
The robot "MAVR". Research on algorithms
improving for the robot control during its moving in the natural environment
continued in 1984-1986 using model "MAVR". This work was commissioned
by the Ministry of Defense of the USSR and was focused on the robot creation
that is able to move directionally in the complex environmental surrounding.
1984-1986